1 什么才是引爆5G应用的大杀器?
2 火爆的存算一体芯片,机会在哪儿?挑战何解?
3 华创资本熊伟铭:中美科技分叉,中国迎来最大一波科技创业机会
4 北大物理系91级校友吴蔚:将纳米技术从有趣转换成有用
5 全球视角下的中国碳中和博弈 | 燕缘科创No.36
6 FMCW激光雷达今年底有望落地,行业巅峰时刻还远未来到
FMCW激光雷达今年底有望落地,行业巅峰时刻还远未来到
2021-05-07




4月9日,燕缘科创NO.34期,微源光子董事长兼总经理、北京大学2007级校友朱晓琪为大家分享了《从硅光通信技术看FMCW lidar的集成挑战》。朱晓琪本科毕业于北京大学信息科学技术学院,博士毕业于北京大学区域光纤通信网与新型光通信系统国家重点实验室。拥有十多年光通信领域科研经验,在激光器领域拥有多项发明专利,特别是在窄线宽激光器集成化、芯片化及量产方面积累了丰富的经验,攻克了许多技术难题,解决了行业内的痛点。2018年底朱晓琪创立微源光子(深圳)科技有限公司,致力于高性能激光器研发和生产,公司一年半时间完成三轮融资。

本次直播,朱晓琪分享了FMCW激光雷达的产业化优势和机会,详细阐述了该技术路线所面临的三大技术难点:激光器、OPA以及激光器与硅基芯片的集成,同时对比分享了市面上四种激光器的优缺点,以及解决耦合差损问题的多种技术解决方案。朱晓琪称,集成式FMCW激光雷达今年底有望落地,跟硅光相结合的完全固态FMCW激光雷达估计还要两三年时间,最终FMCW的商业化可接受量产成本在千元人民币左右。
以下是朱晓琪直播分享整理:
大家好,我是朱晓琪,非常感谢大家在周五晚来收看我们的报告。之前的活动中,周治平教授、王兴军教授给大家介绍了什么叫硅光通信。硅光通信技术是一项传统光模块向集成式发展中的重要技术路线。我们的激光雷达产品与其说是一种传感器,其本质上更接近于一个光模块。激光雷达中包含的收发信号的调制解调算法跟光模块有非常多的类似之处。所以我这次做的报告就是从硅光通信这个技术看,将来整个FMCW激光雷达要做集成化芯片,可能会面临哪些技术问题和挑战。我本硕博都就读于北京大学,在光通信领域从器件到系统、算法都做了很长时间,我们公司现在主要聚焦窄线宽激光器研发生产。
激光雷达行业作为一个标准的新兴技术行业,其实也走过了一个很经典的Gartner曲线。
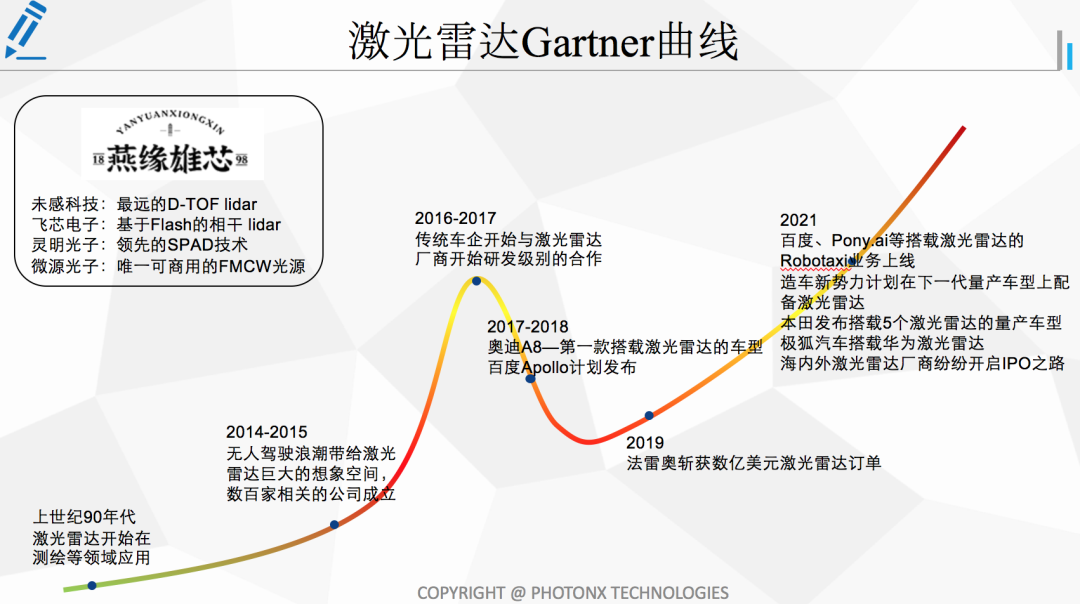
激光雷达发源很早,上世纪90年代已经用来做测距测绘,质量、气象的检测。2014年马斯克的无人驾驶概念提出,激光雷达被业界赋予了很大的想象空间,当时至少有超过百家初创企业成立。2016~2017年,很多传统的车企开始宣布跟激光雷达厂商合作,第一次将行业推向了高潮。紧接着2017~2019年,随着资产泡沫,包括马斯克一直不看好激光雷达,激光雷达走过了一个短暂的低谷期。但是我们也看到2020年激光雷达厂商业绩都还不错,这两年百度、小马智行这些搭载激光雷达的Robotaxi业务开始上线,小鹏、蔚来这些造车新势力也开始宣布在下一代量产车型上要配备激光雷达,传统的本田、奥迪都已经要做搭载激光雷达的量产车型。前几天极狐汽车也宣布搭载华为的激光雷达,国外已经有多家激光雷达厂商开启IPO。这个行业逐渐进入一个发展的高潮。
燕缘雄芯平台上也有很多家在从事这方面研发的公司,比如未感科技有400m的D-ToF lidar可以做到目前业界最远距离,飞芯电子在研发基于Flash的相干技术,灵明光子也有领先的SPAD技术。我们现在是做FMCW,跟ToF相比有一些好处,比如在极端天气下的表现、夜晚的工作能力、抗干扰的能力、角度分辨率等方面。所以最近越来越多传统巨头开始投入到这个领域的研发,成为最新最强有力的竞争者,比如Intel/Mobileye在2021年初发布了FMCW lidar样品,当然这个样品更像一个概念机,与最终的产品还有很远的距离。像华为这样的公司也在做这方面的研发。
新型的激光雷达基于相干光学和原理,采用线性调频连续波(FMCW)方案进行四维感知,除了深度信息外,还可以根据多普勒频移推算瞬时速度。传统激光雷达通过ToF(Time of Flight)技术测距,是根据发出一个脉冲跟收回这个脉冲的时间差来反算物体的距离。FMCW测距原理跟ToF测距有一个明显的不同,是在光上进行了一个频率的调制,根据调制信息对频率差来反推物体的距离,这样做的好处有几点:
首先,接收是用一个相干接收方案,能够提供比传统ToF更高的接收灵敏度,能够使探测距离更长,同时更好的抗外界干扰。但这样的方案成本会比较贵,业内也经常会说FMCW方案供应链体系不成熟,成本会很贵,比较难。
其次,FMCW能够提供像素级的速度信息,能够给自动驾驶更高的一个感知维度,比如远处有一个离我们正在高速远离的车辆,是不需要对它进行任何避障处理,但如果有一个很远的地方有个向我们高速驶来的车,就要对车进行一定的避障处理。无人驾驶的算法中如果有像素级别的速度信息,会更利于做L3以上的无人驾驶。
第三,FMCW是一个抗干扰的设计,如果大家都安装了激光雷达的复杂环境中,互相之间不会有任何的干扰,因此综上所述它是一个被业界认为性能上会更优的一个解决方案。FMCW激光雷达有哪些构成?雷达一般由发射机、接收机、天线构成,相对照激光雷达中,发射器对应的是激光器,接收机对应的是探测器以及相干光路,扫描部件就是经常会提到的转镜、memes或者OPA。
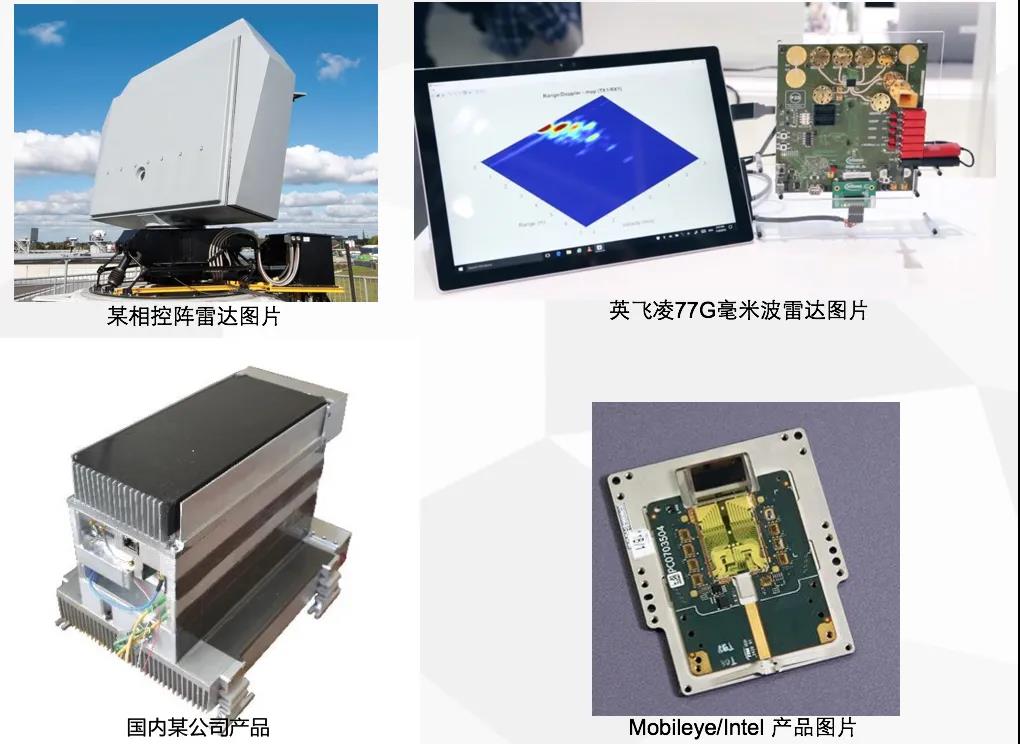
上图第一张是分立器件做的比较高性能,用于特殊用途的相控阵雷达,小型化、集成化的方案就是英飞凌77G毫米波雷达。下面左边是杭州的一家公司做的分立式产品,体积比较大,我们现在要研究的就是怎么样把它做成右边这样,英特尔/Mobileye推出的集成式产品。在集成化的过程中,会有这样几个难点。
第一个难点是激光器,FMCW激光雷达对计算机的要求非常非常高,要做集成化意味着一定要选用半导体激光器,固体、气体这种光纤式的激光器基本就不在考虑范围内。目前商用的能够实现窄线宽输出的激光器大概有四种类型:DFB、DBR、外腔以及通过窄线宽激光器的种子元加上外调制的方案。
下面我们一一做一下比较,比较的维度有这样的几点:第一是线宽,线宽对应的是频率噪声,频率噪声对接收信号有非常大的影响。第二个是线宽的动态展宽,就是在调频的过程中线宽是不是仍然足够优秀,它的频率噪声是不是仍然足够低。第三个维度是调频的线性度,如果这个调频不是线性的会让测距跟测速的能力、分辨率都会恶化。第四个考虑的维度是调频功率的起伏,激光器在进行频率调制的时候,我们希望它的功率保持不变,如果功率变了就会牺牲ADC位数。最后一个维度要考虑所有这些激光器的类型、价格、量产能力是不是能够满足激光雷达真正的需求,如果不满足,这个市场就永远起不来。其实还有一个隐藏维度就是功率,在真正的激光雷达需求中,这四个方案都不满足功率需求,我们也在做更多的研发怎么样把功率提高。
下面我们分别来看这四种激光器方案: 第一种DFB激光器,它的静态线宽一般在1M到5M,不满足真正需要相干测距的频率噪声,通常DFB激光器做测距,大概做到二三十米,距离会比较近。DFB做调频天然是一个非线性的过程,虽然可以通过后期算法优化做一个预失真的补偿让线性度变好,但是很重要的是调频的时候功率会有一个剧烈的起伏,最后导致小信号接收的时候,AD的位数实际上有效度非常低。但目前DFB激光器的价格以及量产能力是几种方案中最好的。
第二种DBR激光器,它一般由三段或者四段激光器组成,包括一到两个光栅区,静态线宽在做到比较好的情况下是200k,一般情况下500k,静态的频率勉强够做一个200m左右的测距。但DBR激光器结构比较复杂,相位调节区的载流子浓度变化,实际上带来的啁啾效应很复杂,在真正实现调频的时候它的线宽会比静态线宽要展宽,大概也会恶化到兆赫兹级别。所以在静态测试线宽平均噪声的时候,我们认为它的信噪比够了,但一旦在进行实测去调频的时候,信噪比其实是不够的。
第三个它的调频线性度,原理跟DFB激光器比较类似。它还有一个比较不太好的问题是整个DBR的方案会比较复杂,会经过很多很多次的外延,导整个产品的量产良率会大幅下降,因此DBR激光器早期被提出是作为一种可调谐激光器方案,但它一直没有在业内大规模使用开,这也是它本质上的一个缺陷。第三种方案叫做外调制方案,是用一个单品的窄线宽激光器种子源,加上一个光纤外调制的调制器来实现线性调频,这个调制器可以是一个宽带的平行MZM,也可以是一个窄带的AOM。这个方案在测风雷达上其实用了蛮多,也比较成熟,在整个线宽的表现、动态性管理的展宽、调频的线性度、功率的起伏上都是表现最优的,但是它有个最大的问题就是价格太昂贵。目前很多早期的理论性文章或者原理样机,可以用这样的方案来做,一套成本至少在10万人民币量级,永远没有办法满足车规量产的需求,同时这样一套复杂的光纤链路,要真正去过车规还比较困难。
最后一个ECL激光器,也叫外腔激光器,它本质上是通过一个外部的谐振腔反馈,把整个激光器的谐振腔Q值做得比较高,因此实现了线宽指标,功率、噪声、频率都会比较低,目前它能够实现的线宽在k赫兹量级,能够支持到公里级别的测距。限制它的原因就是功率。另外一个就是它的线宽的动态展宽,可以在腔外去呈现而不需要去动整个芯片内部一个有源区的折射率,折射率会很稳定,也不会有一个线宽的动态展宽过程,没有非线性的啁啾。第三它的调频线性度、功率起伏也可以优化。最后它的量产能力跟使用实用性,还会稍弱一点。因为它所谓的外腔,需要一个除了半导体增益芯片以外的一套反馈机制,这个反馈机制严重地制约了它的量产能力。目前在这个产品上做的最好的是美国的新飞通公司,在长距离骨干网的通讯市场上有量产的激光器,其他家基本是一些小批量生产能力,所以业界一直认为窄线宽激光器这个产品是不能够大规模商用的。
除了激光器,激光雷达的另一个难点是扫描部件,也就是我们所说的光学相控阵。讲到OPA,不得不提到MIT Michael Watts组的工作。所谓光学相控阵利用的就是一个远场跟近场的光场傅里叶变换,在近场的时候看相控阵上的每一个单元,可以把它叫做一个像素,这个像素它通过p-i-n的结构去做一个相位的控制。孙杰在2013年Nature的文章中一共做了8×8的pixel阵列,每个阵列上它都有一个幅度信息、相位信息,我们把这样一个加权的矢量图认为是一个相控阵的近场,远场就是它的一个复列变换,通过单独控制每一个pixel上面的相位,就可以得到在远场不同的光斑分布,以及它们的一个扫描角度分布,这是OPA的核心基本原理。
但是,这个demo做出来以后有很多问题。第一个问题就是旁瓣的抑制,这个事情在雷达里也遇到过,如果想要把一个波合成的特别好,旁瓣抑制的非常干净,那么除了相位控制外,还需要做幅度的控制,因此2019年Michael Watts组在这个原型上还加入了一个幅度的控制,最本质导致的一个结果就是驱动除了驱动每个pixel上的相位信息,还要驱动幅度信息,就会让驱动变得更复杂。第二点就是整个相控阵跟光源之间的耦合会有很大的一个插损,这是整个业界都不好解决的一个问题。第三个就是在每个pixel中间,其实是用热调制,热调制的速率就会最终决定扫描的分辨率问题,然后还有它的视场角,我们希望它的视场角很大,还需要它的pattern能够做得比较复杂,最后结果就是天线数要非常非常多,或者说像素数要非常多,同时还要保证一致性。当我们把这个8×8进一步扩展到64×64这样的结构中,工艺难度以及这些很密的波导之间的串扰,就会让性能大幅下降,因此OPA就有一些这样的问题。但是我们也知道这些问题其实可以通过不断的流片迭代来优化解决。
第三个难点就是耦合差损问题。激光器我们一般用三五族的材料去做,扫描部件的OPA、相干光路以及探测器都可以集成在一个硅片上,这个是通信上已经做好了的事情,现在要解决的就是一个三五族的芯片,怎么跟硅基的芯片做集成。这个集成我们期望它们的材料是非常匹配的,波导模式也是非常匹配的,这个匹配包括折射率的匹配、模场的匹配。第三个我们希望热是匹配的,在不同的温度下这些结构的热胀冷缩差别非常小。第四个我们希望这样的一个耦合方式,它是易于量产的。这是我们的期望,但是我们面临的事实其实跟我们期望的差别非常远。不管是光纤输出的波导,还是直接输出的波导,它们的模场都远远大于硅基单模波导模场,同时这些材料的系数完全不同,因此要把两个芯片耦合起来,其实难度是非常大的。
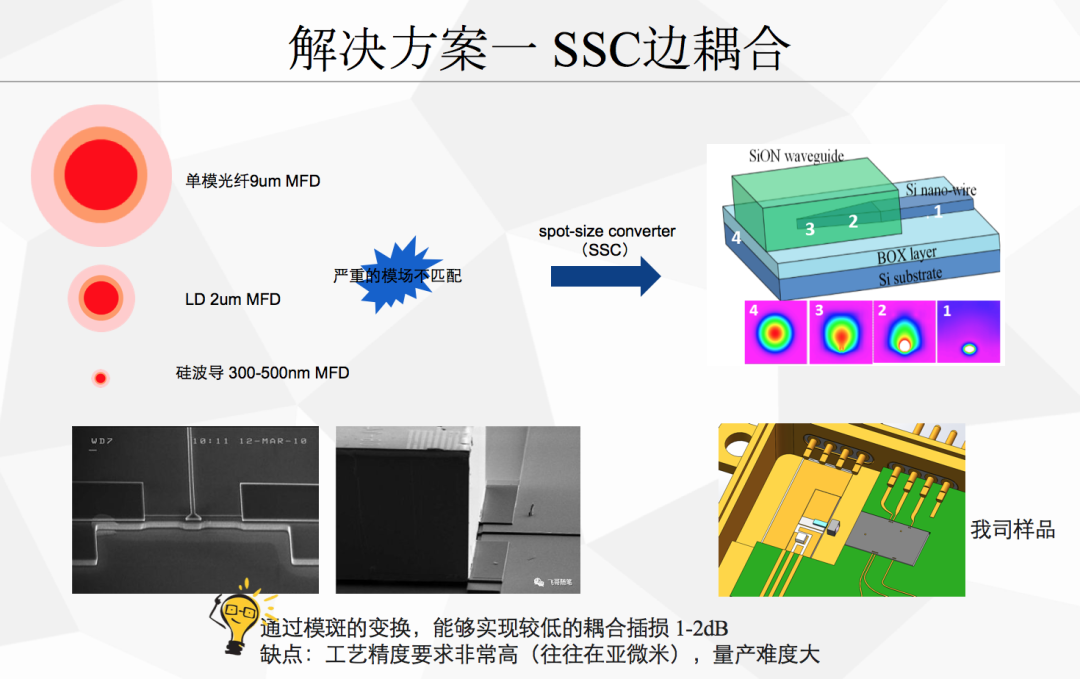
我们看一下传统的解决方案、还有一些新型的解决方案分别是怎么做的。第一个解决方案叫做模斑变换,左边这个图我做了一些示意,包括单模光纤9微米的一个模场,一般的大功率LD 2微米的模场,还有硅波导通常模场在300纳米到500纳米之间。这三个不同的光斑放在一起,它们差别会非常非常大,也就是所谓的模场不匹配。为了让它们的模场匹配,在硅的芯片上通常会做一个spot-size converter,它的原理大概是在一个很窄的300~500纳米的硅波导上做一个taper,当taper越来越尖的时候,传输在波导上的光模场就会变得越来越大,然后再去用一些氮氧化硅材料做一个折射率的匹配,就能够在四端面产生一个比较大的折射率与空气或二氧化硅所接近的模场,实现从单模光纤或者从LD到硅波导的传输。我们公司也做过这样一些尝试,采用透镜式的办法得到了一个比较好的效果。但这种办法对工艺的要求非常非常高,一般是在亚微米级别,同时它需要一个有源的耦合,量产难度就会变得非常非常大。
第二个解决问题的办法叫做体光栅,光从波导上过来进入光栅的时候,可以向外辐射光,包括还会透射光,还会从衬底上露些光,有几个不同的方向,我们希望的是光从这个波导进来,大部分的光能够出去,或者照到这个光栅上,然后从一端耦合进去,这是我们的理论期望值。我们也做过这样的一些耦合方案,会在硅基芯片上粘一个非常小的斜角棱镜,进行一个耦合,这样的方案其实是比较容易实现机器视觉的无源耦合,但它的问题是一个基于波的干涉效应,因此对波长很敏感,它的耦合差损也会比边耦合方案天然要大。
第三种是英特尔推出的一种叫做硅基激光器的方案,先拿一个硅的晶圆,在晶圆上做好掩埋层跟单晶硅以后,在单晶硅上刻蚀单模波导。再去准备一个外延片,包括衬底,把延片切成一个一个的芯片,再把它倒装贴在做好的硅单模波导上,做好以后先要用一些化学办法把InP衬底去掉,然后去做刻蚀,再去掺杂n极,做n极的电镀,p极和p极的电镀,做一些等离子的退火,然后就可以在已经做好的单模波导上出光。
这个方案听上去非常美妙,但也要看到硅的波导仍然有一个尺寸特别小模场做不大的限制,因此即便能够通过这样的方案出光,出的光也非常非常小,我看到文献以及报道一般都不到10毫瓦,同时量子效率也非常非常低,只能拿来做一些短距离的传输,如果要用它做一些大出光,实际上非常难。这个方案目前在全世界范围内也只有英特尔做得比较好,工艺难度非常高,激光器的出光功率非常非常低,也不适合做FMCW激光雷达。
除了上面三个目前已经实践过的经验外,还有一些创新的方案。比如加拿大渥太华大学一个比较有名的教授,他做的三五单片集成技术方案,就是把很多在硅上要做的事情,在三五族材料上做。但是基于三五族的半导体技术,其实在业内一直没有实现过非常好的规模量产,包括像DBR激光器本身,还有像EML激光器这样稍微偏复杂一点,需要多次外延的激光器,实际上良率也非常非常低。因此如果要把这样一个复杂的系统,包括了各种各样的调制,全部都集成在一个三五族单片系统上,这个良率可能会大幅度下降,再加上InP或者砷化镓晶圆价格比硅大的多,因此这个方案在整个业内实践中可能会遇到一些目前还无法想象的困难。
还有一个有意思方案叫做光子引线photonics wire,这个方案是由德国一个大学提出,他们也在做设备级的创业。原理就是参考传统芯片的引线,做光子引线,这是一个很具有实用价值前景的一套办法,但它的可靠性具体怎么样,还没有经过很长时间的验证,同时它的设备非常昂贵,目前一套设备可能要上千万。
我们公司在FMCW激光雷达中做了很长时间的探索,现在推出的激光器本身就具有窄线宽输出功能,具有线性调频功能,而且我们能做比较大的功率,也不需要原来复杂的高频射频源与射频驱动,把这几个东西全部合在一个激光器模组中,线宽大概是10k赫兹以下,功率能够实现18dBm或者16.5dBm的光纤耦合输出,驱动只需要一些百k赫兹级别简单的方波三角波就可以。它线性度好实测也比较好,在电压驱动中能够实现3%~5%的非线性,电流信号驱动中在1%以内的非线性。如果用这样的激光器做激光雷达,在20赫兹的刷新率下扫描,可以实现一个0.024的角度分辨率,20赫兹2D扫描16线情况下,可以实现一个0.2度的角度分辨率。
我们公司在这个领域其实做了很长时间,现在还在做迭代的优化,包括我们会实现基于这样的一个窄线宽激光器瓦级的功率输出,还会去做能够支持量产的0dB硅光的插损耦合方案。在功能性迭代方向,我们也在做车规性要求,推进国家标准的消费级、工业级还有军用级的标准。
总结一下,集成式的FMCW还面临很多很多挑战,整套系统中不仅需要窄线宽激光器,需要做一个线性调频,对它的功率放大,需要对它进行一个低插损耦合方案,在硅光中还需要做光开关,做相干耦合阵列,做OPA阵列等等。除了光学的部分,还需要做控制、算法、状态检测等等,目前FMCW激光雷达的集成化产品,特别像早期的光模块情况,有很多创业公司去做算法、器件、激光器等等。随着产业的不断成熟,技术成熟,这中间会出现非常非常多投资机会,行业兼并机会。我们现在经常会说FMCW应用在L3-L5级别的无人驾驶,实际上不仅仅在交通,在工业制造、医疗器械、气象勘探、化工、安防等等方面,都有非常大的应用价值,相信这是一个远远超过千亿级别的市场,等着大家一起合作共赢。
Q&AQ:我想请教一个问题,你刚才提到的SSC边耦合是能够双向的吗?还是只能是从小到大?
A:它本质上是一个双向的,但是一般都是三五族的激光器去发光或者经过一个单模波导发光,要把光耦合到硅波导里,所以一般用的时候实际上是单向的。
Q:你觉得FMCW激光雷达什么时间能够进行商业化,商业化推广以后,预估成本在多少能够被市场接受?
A:其实不太好真正给出一个很详尽的结果,因为从事技术突破往往都在一瞬间。我个人认为纯芯片集成式的FMCW今年底应该会落地,跟硅光相结合或者跟其他方式结合的完全集成式FMCW,还要看OPA的进度,估计大概在两三年时间。成本的问题,如果是完全集成的FMCW,我觉得做到千元人民币左右应该不太成问题。
Q:目前是整个激光雷达行业第一梯队的公司规模已经起来了,像禾赛之前也报了上市,这种情况下创业公司还有机会吗?
A:以光通信市场举例,其实光通信市场也经过了非常多的玩家淘汰,很多很早做的很好的光模块厂后面就消失了,在这个过程中又出现了新的团队,新的技术。我觉得激光雷达市场目前只能说有一批厂商做出了第一批成果,但整个市场还远远没有打开,市场的巅峰时期远远没有到来,所以我觉得非常多的行业机会在等着大家。